SeaBED-class AUVs have shown their versatility in environments ranging from the open ocean to the dense ice cover of the Arctic.

WHOI engineer Hanumant Singh developed this autonomous surface vehicle (ASV) and, together with scientists Fiamma Straneo and Sarah Das, deployed the vehicle for field studies with support from the Arctic Research Initiative.
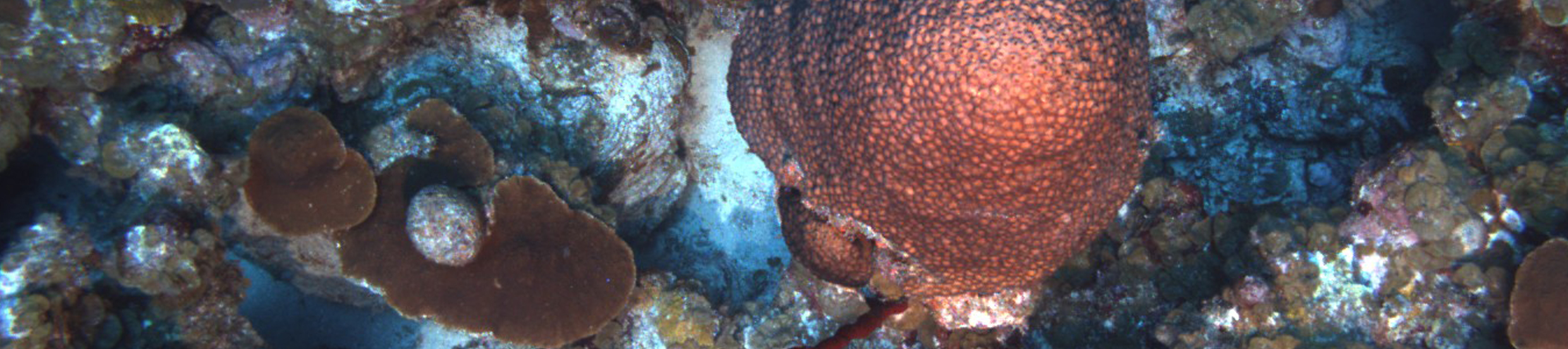
We collect a lot of data from underwater environments related to fisheries, coral reef ecology and other applications.
![]()
![]()
![]()
![]()
![]()
 WHOI is the world's leading non-profit oceanographic
research organization. Our mission is to explore and understand the ocean and to
educate scientists, students, decision-makers, and the public.
WHOI is the world's leading non-profit oceanographic
research organization. Our mission is to explore and understand the ocean and to
educate scientists, students, decision-makers, and the public.