
The multibeam echo-sounder is one of the two main instruments built into the ship for the purposes of mapping the seafloor. When standing watch, it’s one of the systems that must be monitored to ensure it’s constantly able to track the bottom. It’s also the source of the second half of a watchstander’s duties: processing.
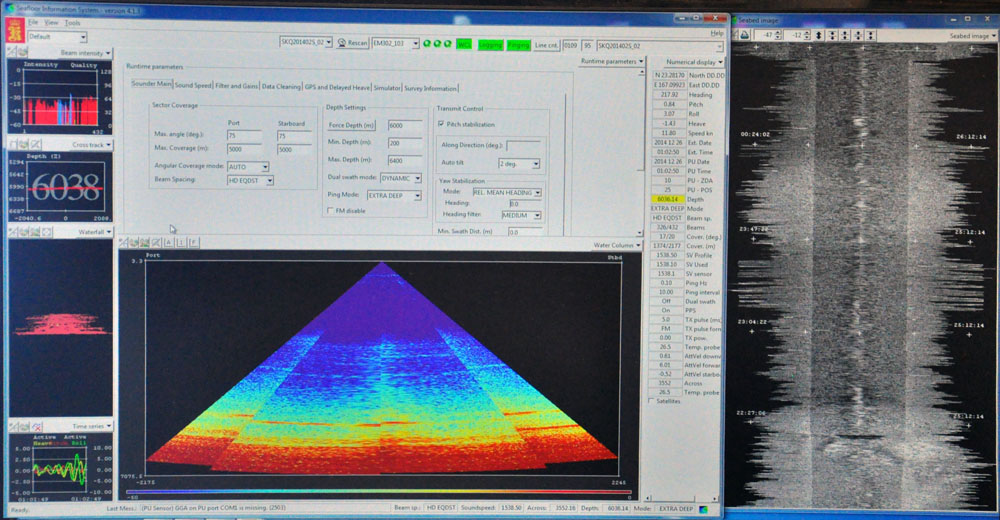
The EM-302 interface. Read on for details…
Thanks to Ethan for a thorough review of the EM-302
In the picture above, the current depth directly below the ship is displayed in large numbers at left. Below that, a 3D schematic of the local seafloor. The colorful triangle represents the returning sonar pings from the whole survey swath, and the white line shows a slice of the bottom perpendicular to the ship’s direction of travel. The grayscale column at right is a trace of the backscatter — more on that later.
Depth sounding, the process of determining the depth of the ocean beneath a vessel, has always been of critical importance among the nautical pursuits. Formerly the province of a lead-weighted line, graduated with knots or markings at regular intervals, this task has routinely been, since about the 1920’s, accomplished by precisely measuring the travel time of directed sound pulses. By knowing the speed of sound in water and timing the trip taken by a sound pulse from a transmitter aboard a ship down to the bottom and back, the total distance travelled by the pulse and therefore the depth of water (half that distance) can be easily calculated.
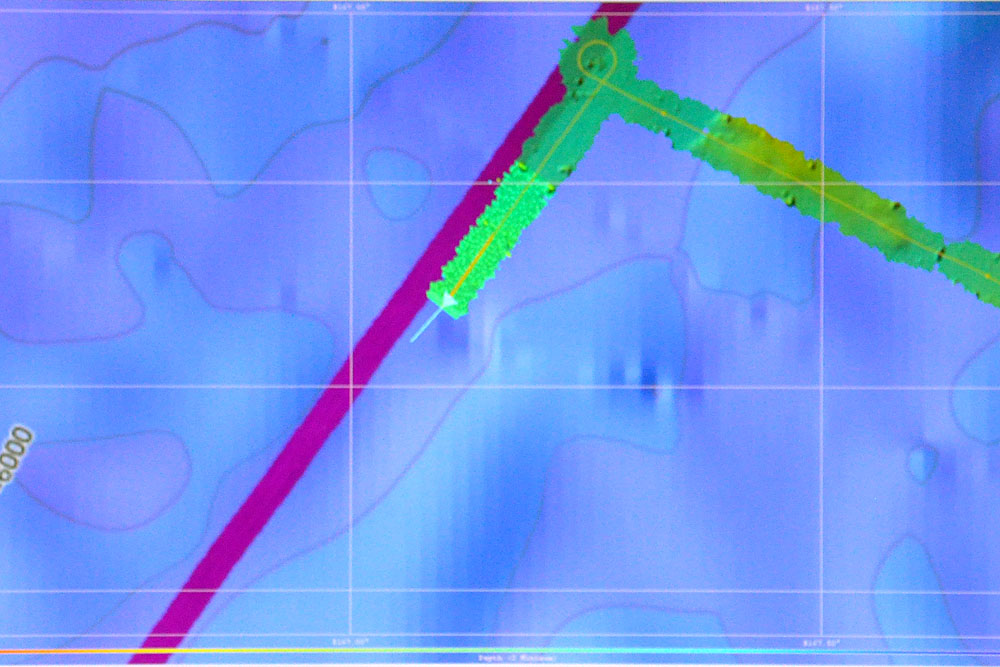
Mapping output of the multibeam. Pink track: a previous cruise. Green track: our cruise. The looping turn increases coverage of that part of the map; turn too quickly, and some of the seafloor would be missed between pulses.
A conventional echo-sounder (or a lead plumb-line for that matter) provides a single sample: the depth at exactly one point on the ocean floor. As you may have guessed, multibeam systems like the EM-302 take simultaneous depth readings at many points which can be combined to form a line of readings across a portion of the seafloor. Taking many lines, or slices, in succession and stacking them together provides a 3D map of the bottom.
The EM-302 receives 432 individual return beams per ping, each of which consists of a pulse of sound at 30 kilohertz (that’s a considerably higher frequency than the maximum extreme of human hearing). This is in contrast to other echo-sounders, who operate at lower frequencies e.g. 12khz. Higher frequency requires more power, and means the pulses are still decipherable after returning from greater depths.
The multibeam has another capability that makes it unique from other echo-sounding sonar. Any time a wave crosses a so-called density gradient, that is, a boundary between a medium in which it has a higher speed and another medium in which it travels slower, part of the wave will bounce or reflect off the boundary while the rest will continue into the new medium at the new speed. Mapping the ocean bottom, we are most interested in the most noticeable, very stark density gradient: the bottom itself, the boundary between the water, where sound moves at around 1500 meters per second, and the sediment and rock of the seafloor, through which acoustic waves travel much faster. This boundary is the clearest to observe in the timings of returning sonic pulses, and the software that drives multibeam shows it as a white line in the main display window. But the multibeam is recording the returning pulses from every density gradient, not just the seafloor. That’s why the main triangular view shows a range of colors: each blob shows a place in the water column where the sound waves changed in speed, which the multibeam noticed as a change in return time. It is possible to see, for example, schools of fish and other features of the water column in addition to the depth to bottom with this instrument.

Rachel is looking forward to the multibeam processing shift after the heaviest rolling we’ve experienced so far
Since the EM-302, a large device which consists a transmitter array along with a receiver array, is built into the ship’s hull, it is susceptible to the motion of the vessel. Making sure that each swath of depth readings from the sonar corresponds to the correct location on the map relative to all the other readings requires accounting for the precise attitude, or orientation, at the moment of each observation. Unfortunately, between the motion of the ship in heavier seas and the bubbles produced along the hull by the ship’s drives, there is sometimes plenty of interference causing the multibeam to return noisy data. This is where the student watchstander who isn’t monitoring the max depth and ping mode steps in.
We’ll talk more about cleaning up multibeam data soon.




