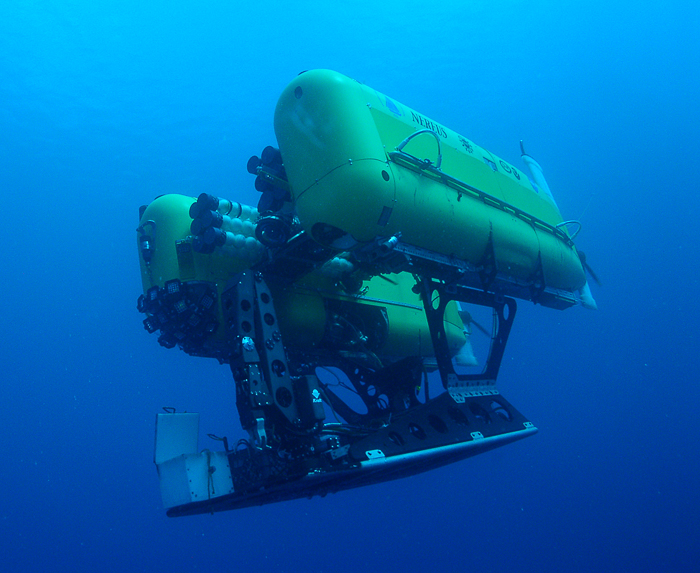
Hadal-Lander B, affectionately known as Nacho to those in HADEEP, is composed of two major components; the scientific payload and delivery system.

Scientific Payload
Hadal-lander B is a free-falling baited lander equipped with a 5 megapixel digital still camera (OE14-208; Kongsberg Maritime, UK) and a Conductivity, Temperature and Depth (CTD) sensor (SBE-19plusV2; SeaBird Electronic Inc. USA). The camera is mounted vertically (altitude 1 m) providing a visible area of 62 x 46.5 cm (0.29 m-2). Approximately ~1kg of bait (Tuna, Thunnus sp.) is attached to a 1cm diameter scaled bar in the centre of the field of view (FOV) and positioned to intersect the sediment-water interface. The bait emits an odor plume in the ambient currents which is detected by scavenging fauna that then follow it up stream to the lander. Time-lapse images are then taken of these bait-attending fauna at 60 s intervals. The CTD probe recorded temperature (˚C), salinity, and pressure (dbar) every 10 seconds throughout the deployment. This provides both vertical CTD profiles through the water column and bottom CTD measurements over 12 to 24 hours. Both the camera system and CTD probe is pre-programmed prior to deployment and therefore record autonomously. All data are downloaded upon recovery.
Hadal-Lander B is also often equipped with an array of small baited funnel traps, positioned either on the end of each of the 3 legs or on the mooring line. These small traps are used to collect small scavenging crustacean samples, primarily amphipods, for taxonomic and phylogenetic analysis.
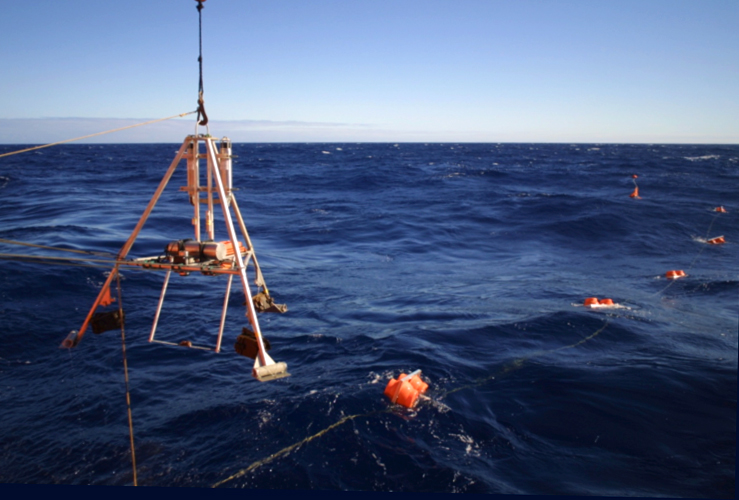
Delivery System
The lander delivery system comprises the instrument frame (aluminium), a mooring in which 6 buoyancy modules are coupled ‘off-line’, three steel ballast weights and two acoustic release system to jettison the ballast weights. The lander is deployed with these three weights attached, weighing a combined 135kgs. The lander then descends to the seafloor at ~50m/min whereupon it crash lands on the seafloor. At the end of the experimental/observational period, a unique acoustic command is sent from the ship which triggers the ballast weights to drop. Two acoustic releases (AR2500-ti; IXSEA, France) are used in the unlikely event that one should fail to activate. The lander then ascends to the surface at ~30 m/min by virtue of the positively buoyant mooring consisting of multiple 17” evacuated glass spheres (Nautilus Marine Services, Germany). To aid recovery, the lander is equipped with a large orange flag, a strobe light and a VHF beacon (Novatech, Canada).
Hadal-Lander B has been used extensively in the Kermadec Trench and Peru-Chile Trenches from depth between 4300 and 8074 metres on the Kaharoa KAH0910 cruise, (2009) and the RV Sonne S209 cruise (2010).
Data
Examples of data from Hadal-Lander B are featured in:
- Jamieson, A.J., et al., (2011) Marine Biology. DOI 10.1007/s00227-011-1767-7
- Jamieson, A.J., et al., (2011). Deep-Sea Research I 58, 49-62
- Jamieson, A.J., et al., (2009). Marine Technology Society Journal, 43(5), 151-159.