My pre-existing excitement about participating in Mapping, Exploration, and Sampling at Havre (MESH) grew exponentially when I discovered that Sentry would be involved in our expedition. Sentry, featured in our ‘technology’ page, is an autonomous underwater vehicle (AUV) capable of surveying the seafloor at depths down to 6000 m.
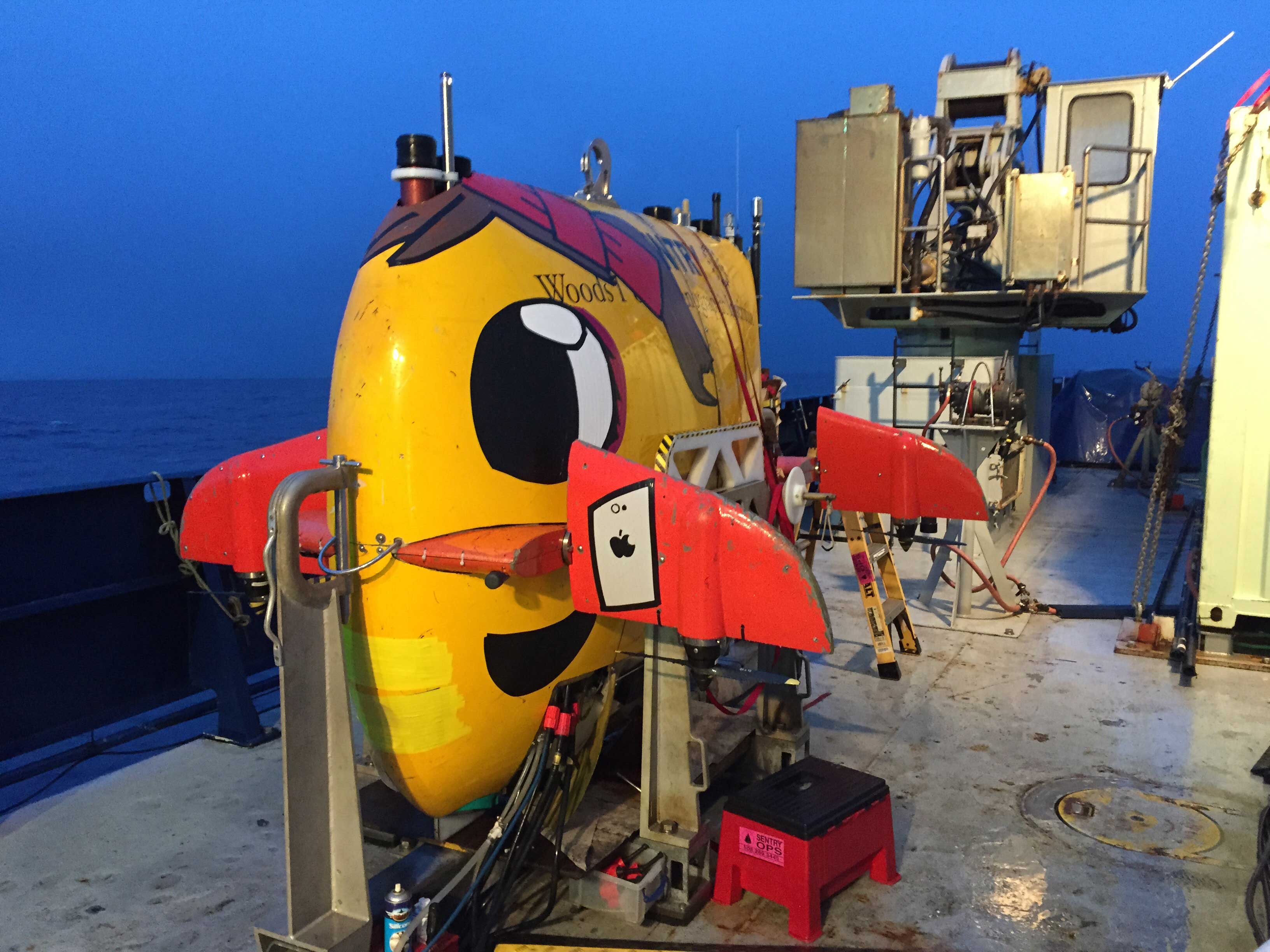
Sentry (decorated by Justin) during the MESH cruise.
Unlike remotely operated vehicles (ROVs), we have limited ability to communicate with AUVs while they are on the seafloor. The majority of communication with Sentry occurs before it leaves the ship. Typically, the expedition lead for Sentry, Dana Yoerger, will discuss the goals for the Sentry dive with the cruise co-PIs, Adam Soule and Rebecca Carey, plan the dive, and work with the Sentry team to program Sentry. Among many other things, Dana takes into consideration the seafloor topography, available dive time, and desired data outputs.
After programming, the Sentry team deploys the vehicle over the side of the ship. Then Sentry descends to the seafloor. While conducting surveys, Sentry ‘flies’ above the seafloor at an altitude of ~60 m (196 ft). Sentry travels back and forth around the survey area, like it is mowing a lawn. As it travels, Sentry sends out acoustical ‘pings.’ These pings reach the seafloor, reflect off the surface, and return to the vehicle. From the timing of the pings, Sentry calculates the distance to the seafloor. This method is called a multibeam survey and from the multibeam survey we can create precise maps of seafloor bathymetry. Sentry also collects sidescan sonar, water column properties, magnetometry, and sub-seafloor information. All these data are crucial to our identifying and understanding the processes occurring at Havre.
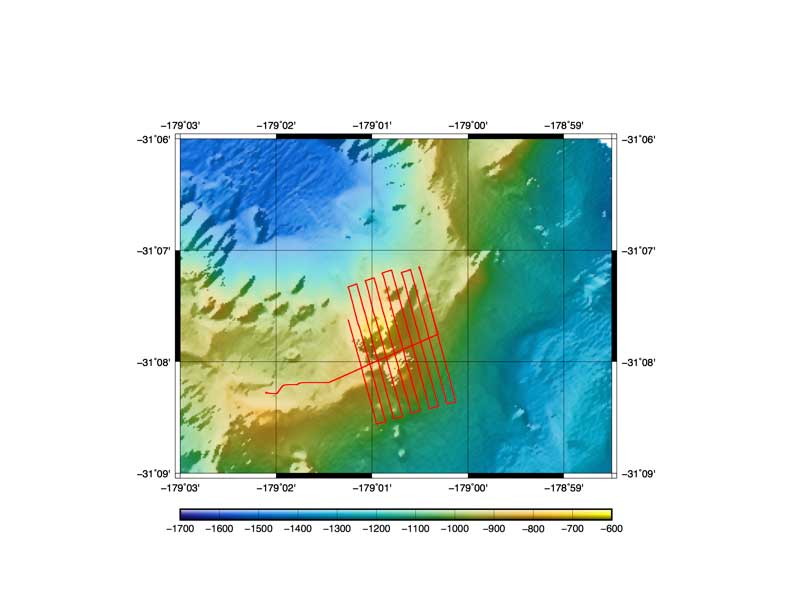
Sentry follows a planned trackline, such as the one shown in red, to most effectively map and survey the seafloor. This approach is commonly described as ‘mowing the lawn’.
After completing the survey, Sentry returns to the surface and the ship collects it. The Sentry team works hard to process the Sentry data, recharge the vehicle, and addresses any mechanical and electrical issues that may have occurred during the dive. After about twelve hours, Sentry returns to the water for another dive
Ideally, Sentry dives involve the relatively straightforward process of programming and deploying the vehicle and returning to pick it up. However, things don’t always go as planned. For instance, rugged seafloor topography can result in Sentry getting uncomfortably close to the seafloor. Or, Jason and Sentry might get too close to each other. The Sentry team can then remotely send commands to the vehicle. They may tell Sentry to increase its distance from the seafloor or move over to give Jason more room. These commands usually solve the problem. If not, the Sentry team can give an ‘abort’ signal causing it to surface. If Sentry remains uncomfortable, it can also surface on its own, which we refer to as Sentry ‘freaking out’.
My fondness for Sentry results partially from the beautiful data that it collects. The multibeam bathymetry provides a spatial resolution of one square meter, allowing us to pick out individual pumice blocks on the seafloor. The water column data enables easy identification of chemistry and temperature anomalies, common signs of hydrothermal activity. From the sidescan sonar, we can map out the extent of geologic features that would take days, if not months, to fully explore with an ROV.
But, I also appreciate Sentry for its personality. Justin, a member of the Sentry team, describes Sentry as a ‘teenager’ whenever it doesn’t behave. Each cruise participant seems to have his or her own take on Sentry’s personality. We’re thrilled to have Sentry and the Sentry team working with us during the MESH expedition.