
Any time you use a conventional compass to check which way is north from where you’re standing, you are taking advantage of magnetism, specifically the tendency of a magnetic material to align itself, if its motion is appropriately unconstrained, to the direction of the surrounding magnetic field. Imagine a line extending outward from the north and south points of your compass needle; this line will coincide with one of the field lines which designate the direction of the magnetic field of the Earth. These lines all extend outward from the magnetic north pole and loop out and around (one of them going right through your compass needle, another going through every other magnetic compass needle anywhere around the globe) to dive back in at the magnetic south pole.
Because of what we know of the changing nature of the Earth’s magnetic field, it is possible to imagine that if you had very, very acute senses, you would be able to observe, over the course of several years, the direction to magnetic north from your current spot shifting slightly as the Earth’s field gradually oscillates and reorients itself. You could also observe, if you walked along the surface of the Earth, tiny fluctuations in the direction of the needle as local influences — magnetic fields from magnetic material within the rocks constituting the Earth’s crust — momentarily jostled with the global field for control of your compass’ direction.
This observable variation in the magnetic field as we move over different parts of the Earth is exactly the reason why we are in the Pacific Jurassic Quiet Zone; only instead of a compass and impossibly sensitive eyes, we rely on instruments developed for this specific task: magnetometers.
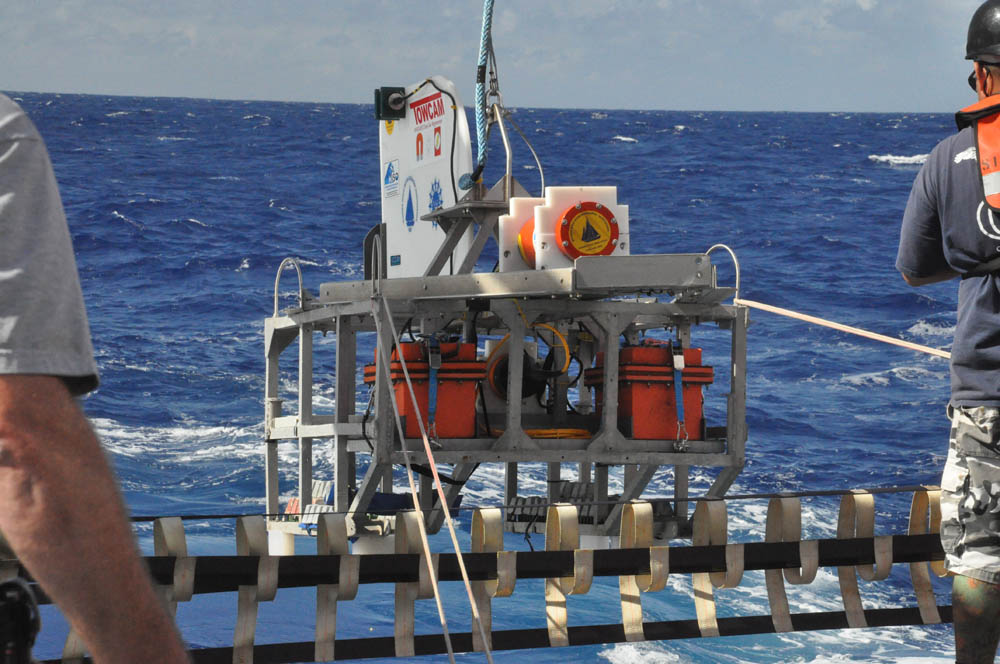
The DeepTow sled, carrying two magnetometers, is deployed overboard off the a-frame
The magnetic field at any given point in space has a magnitude (the strength of the field), combined with a direction (the line along which an imaginary compass needle would align itself if it were placed at that exact spot). It is possible, or rather inevitable, that this value can be thought of as the sum of a variety of magnetic fields from an assortment of sources. Move a bar magnet gradually near your compass and observe how the direction it points is first totally dictated by the Earth’s magnetic north; then it splits between the two, pointing to neither yet influenced by both; until finally the bar magnet exerts such a strong local pull that the Earth’s field is ineffectual at moving the needle at all. This is important: the strength of the force a magnetic field exerts on magnetic material decreases roughly with the square of the distance. Furthermore, the field at any point is the combined result of multiple influences. It follows that it is easier to notice, and therefore measure, the magnetic field associated with a particular object of interest the closer you are to it.
This leads us to the range of magnetometers used on this cruise to the JQZ. In order to get a good magnetic “picture” of the magnetic anomalies here, we are using several different magnetometers. Each operates at a different depth, resolution, and sensitivity, and together they can help to provide a comprehensive analysis of both general magnetic trends in the crust as well as specific details in the record of the Earth’s magnetic field’s polarity reversals during the period when this crust was formed. From shallowest to deepest (and therefore general to specific, lower to higher resolution) , they are:

Maurice connects the surface maggie to its tow and data cable
Surface tow magnetometer. The “surface maggie” consists of a single “Overhauser” nuclear precession magnetometer towed behind the ship by a single cable, which it uses to relay data in real time back to the lab on the ship. These devices are the state of the art in magnetometer technology, taking advantage of the Nuclear Overhauser Effect to provide amazingly accurate, absolute readings of the magnetic field strength. Overhausers are new and improved over older proton precession maggies in that they need lower power but can sample at a faster rate. Old proton mags could only sample at a 6 second rate for the most part, whereas the Overhausers can sample at up to four times per second.
The surface maggie is portable enough to be deployed and recovered by hand, and resilient enough to be usable at cruising speeds. This means it can basically always be in the water, gathering a “wide-angle” view of the magnetic field several kilometers above the ocean crust.
DeepTow magnetometer sled. About half way between the surface and the bottom, giving a medium-resolution, medium-area degree of coverage, the DeepTow sled actually carries two magnetometers: another Overhauser (this one rated for greater depth and pressure), and a 3-axis magnetoresister magnetometer. “3-axis” means the device takes readings along three perpendicular directions, making it possible to recover not only the field strength but 3-dimensional direction as well. “Magnetoresister” means this one uses a material whose resistance changes in response to a magnetic field; measuring this change can yield directional but relative magnetic field readings (requiring a calibration value to recover absolute field strength).
The DeepTow sled consists of an aluminum frame housing both magnetometers, batteries, and a configurable amount of lead ballast weights used to give the sled the appropriate weight on the wire for its target depth. Towed by a long cable from one of the ship’s main winches, the sled operates at a depth of around 2500-3000m. This system is also realtime and sends data up the cable using an ethernet connection similar to a regular home TV/cable internet cable.
Sentry’s magnetometers. Yet another variety of magnetometer rides in Sentry: three 3-axis fluxgate magnetometers, arrayed in a vertical line along the vehicle’s central axis. This type of magnetometer is both durable and compact, and can tolerate nearby magnetic sources, making it the ideal choice for deployment on the AUV.
There is a clear tradeoff between ease of use and quality of data. Each successive apparatus operates deeper, takes readings closer to the ocean crust, and is increasingly complex and time-consuming to deploy. Managing this tradeoff is part of the art of this branch of marine geophysics, and choreographing the timings of deployment and turnaround to synchronize coverage, maximize survey range, and facilitate safe launch and recovery of all these devices to make optimal use of the limited ship time available is a full time task. Fortunately, with numerous cruises under the belts of our chief scientists, instruments that have improved markedly in the twenty-plus years since this research area was first explored, and with a brand new ship and a well-versed technical crew, this particular challenge is, so to speak, down to a science.




